
I guess this has been coming for a while. The ability to use a phone to do "cm" positional accuracy with RTK.
This is almost a practical thing for speed-sailing, but probably not really.
Cost: Not completely unreasonable at around US$599 (plus a good smartphone and waterproofing protection).
Size: Still has to be quite large to accommodate the RTK capable antenna which completely dictates its form. Not really practical for windsurfing but if you were really determined I guess you could try mounting it on top of your helmet. I assume that the antenna must stay pretty close to upright all the time for reasonable results so that could be a bit of a problem.
Access to correction data: This device needs an internet connection to get the real time correction data that makes RTK work. Their website gives a link to a free subscription, but it does not appear to be simple to access. If you need a more local correction service source/sunscription to get the best results, it would be an additional cost.
Accuracy for speed sailing? IF this can achieve sub Decimetre positional accuracy at something like 5 to 10Hz in a dynamic sailing situation, it would be quite accurate for speed, but I am not sure it would be any more accurate than the best Doppler derived bata we have now from our best devices. It would come down to the actual #cm resolution it could achieve in that situation with consistency.
Using a Phone? You still have the big issue of wearing a phone in a way it can be completely waterproof and protected. Quite a risk with an expensive high end smart phone. (I didn't look up the minimum phone specs the app requires, but I assume it would need better than a $50 Android?) I have smashed or drowned about 6 in the last few years using GPS-Logit, and they were cheapies I could well afford to lose. I would not even think about putting my daily use $1000+ iphone at that risk. ![]()
Bottom line? For me it would be an interesting exercise to do some testing against the best Doppler devices, but I don't think it is there yet as a practical alternative at all. (And I am personally not convinced it ever will be) If they can solve the need for a specialised large antenna, and still get the same accuracy, it will be getting a lot closer. ![]()
gpswebshop.com/products/navisys-gr-9029-cm-level-accuracy-rtk-gnss-data-logger-bluetooth-ble-v5-2-rechargeable-battery-ipx7-waterproof-iphone-ipad-data-logger-app
This looks like a similar unit:
www.sparkfun.com/products/18442
As you say carrying all this gear would be problematic. Would it not be possible to somehow record the live correction data as you sail and then apply it to the raw satellite data that could be recorded whilst out on the water with a relatively standard device?
Select to expand quotetbwonder said..
This looks like a similar unit:
www.sparkfun.com/products/18442
As you say carrying all this gear would be problematic. Would it not be possible to somehow record the live correction data as you sail and then apply it to the raw satellite data that could be recorded whilst out on the water with a relatively standard device?
it is my understanding that the data collected by a non-RTK level device, with a standard antenna, would not be good enough, even if you could find a way to use correction data.
From looking at the u-blox chip descriptions, the biggest difference may be just what level of data are saved. RTK corrections need an awful lot of raw data - something like 3000 byte sentences, rather than 100-byte NAV-PVT sentences. I'm not sure if you can even save these data from chips not intended for RTK.
Otherwise, RTK-type corrections by post-processing on a computer are quite doable, IIRC - except that it's not "real time" anymore. It's just that the main use of RTK is for farming and similar applications, where the "real time" part is essential.
In terms of accuracy, RTK definitely has the potential for accuracy exceeding doppler-based estimates. Using simple numbers to illustrate, an RTK integer solution is capable of cm level positioning. So let's quantify using a Luderitz-esque 500m (roughly 50 knots) over 20 seconds with a 1 cm error at the start and a 1 cm error at the end, totalling 2 cm of error (using the concept of start + finish lines). That 2 cm error is essentially spread over the whole 20 seconds, thus equating to 1 mm/s which is roughly 0.002 knots for a 500m at 50 knots. You can use the same back-of-an-envelope calculation for everyday 10 second runs which would be 2 mm/s (around 0.004 knots) of error, regardless of the sailor's speed.
Manfred's devices and the Motions are said to be accurate to around 0.05 knots for the 500 m runs at Luderitz. That's pretty awesome all things considered but an order of magnitude less accurate than the ballpark figures above. Note the figures above are only with respect to the velocity between two points, not instantaneous speeds over time. What we do recreationally is take an average of our speed over ground. Nevertheless the cm level precision of RTK would still exceed the accuracy of instantaneous Doppler-derived speeds.
As Peter mentioned, it's debatable whether we actually need to calculate precise speeds in real time. RTK necessitates either a radio receiver or internet connection to receive the required reference data in real-time. As mentioned, you can simply capture the necessary raw data and calculate the precise positions + speeds completely offline (aka PPK - post-processed kinematic). In principle you can also have more success in getting high precision solutions because PPK works both forwards and backwards, so it can work backwards from a good fix and generate high precision position data which wouldn't be possible in real time.
u-blox list which chips can capture the full raw data (including carrier phase + pseudorange observables). www.u-blox.com/en/technologies/gnss-raw-data
RTK and PPK are both possible with single-frequency receivers, but I believe they are more effective when using multi-band receivers. The data for multiple frequencies allows them to establish an integer fix more quickly which is likely to be important when windsurfing. All that being said, I don't actually know whether RTK / PPK would be dependable when windsurfing if the GNSS signals are regularly lost during submersions, etc. Vibrations might also prove to be an issue but it'd make for an interesting project to assess the feasibility of PPK for speed sailing, particularly how much of the time an integer fix is possible.
p.s. For recreational use I suspect that RTK + PPK probably would be overkill for most people. RTK reference data over the internet is usually a paid / subscription service and the alternative of setting up a base station to capture reference data would also be a bit of a faff outside of competition.
Select to expand quoteK888 said..
So let's quantify using a Luderitz-esque 500m (roughly 50 knots) over 20 seconds with a 1 cm error at the start and a 1 cm error at the end, totalling 2 cm of error (using the concept of start + finish lines). That 2 cm error is essentially spread over the whole 20 seconds, thus equating to 1 mm/s which is roughly 0.002 knots for a 500m at 50 knots. You can use the same back-of-an-envelope calculation for everyday 10 second runs which would be 2 mm/s (around 0.004 knots) of error, regardless of the sailor's speed.
For your Luderitz example, the numbers you give are correct. That's because the official records use end points (gates).
For just about everything else in speedsurfing, speeds are calculated differently, by summing up the speeds over all the data points. If you look at alphas as an example, the end points have to be within 50 meters for a 500 meter run. So the end point speed is generally less than one tenth of the summed-up point-to-point speed. Even a 10-second speed run often contains some curvature, so end point speed is lower.
When using summed up point data, the likely error for RTK data goes up. For example, a 20 second run at 10 Hz has 200 points, each with an average 1 cm error. The total error would be 200 cm, but some of that will cancel out. Simplistic Gaussian error propagation would estimate the error to be 14 cm (square root of 200), but that's also wrong, since we are dealing with directional data (the errors in the direction of travel can cancel out, but position errors perpendicular to the direction of travel do not).
We can use both numbers as error bounds - the actual error would be expected to be more than 14 cm, but less than 200 cm. We can also just look at single point errors: 40 knots are about 20 m/s, or 2 meters per data point at 10 Hz, so a position error of 2 cm is 1 percent. For doppler speeds, we typically get error estimates of about 0.2 knots for single points, which is a 0.5% error at 40 knots.
So RTK could possibly improve accuracy for straight-line, "gated" type of speed contests, like official records - but not for single-point "max speed" than many love to use, and also not for categories like nautical miles, hour, or alpha, which are not done in straight lines. Nor would RTK data be more accurate when speeds are calculated with current programs that sum up speeds from point data (which is what all commonly used programs currently do, AFAIK).
I was thinking more about the requirements of traditional records tbh. When it comes to our recreational purposes, distance errors will of course be cumulative and will also increase at higher rates of logging. The way I consider these cumulative errors is much the same as you wrote above - errors in the direction of travel have the potential to cancel out, but position errors perpendicular to the direction of travel do not. However, the perpendicular errors may not be so significant as one might initially be inclined to think.
As an illustration, we might consider the effect of the perpendicular errors when travelling in a straight line (assuming the fore / aft errors cancel to some degree). Errors perpendicular to the direction of travel (whilst travelling in a straight line) would result in artificial zig-zags in the positional data. If the true straight-line distance over 0.1 seconds were to be 2 meters (i.e. 40 knots-ish) with 2 cm of perpendicular errors then the artificial distance would be 2.000025 meters, according to Pythagoras.
Multiplying that single error by 200 (cumulative error over 20 seconds @ 10 Hz) gives 5 mm total error during the 400 meters. This rough calculation only includes the non-cancelling errors that are perpendicular to the direction of travel and assumes that errors in the direction of travel have the potential to cancel out (which is obviously a big assumption). I think however that the effect of perpendicular errors in this example are not of great concern.
When sailing some kind of curve instead of the trivial straight-line example, I feel that similar principles should probably hold true in that errors perpendicular to the direction of travel are non-cancelling but errors in the direction of travel have the potential to come close to cancelling each other out. It's obviously more complicated and there are more factors involved but I think the Pythagorean thinking still holds true to some extent.
All of this aside, RTK and PPK have such great positional accuracy because of their use of the carrier phase observable (once the ambiguities have been resolved) which makes them way more precise than positions based on the code phase / pseudorange. It's worth noting that the carrier phase observable can also be used to determine speeds which are more accurate than doppler-derived speeds. Those methods may actually be more useful to our niche than either RTK or PPK.
Just as way of illustration, a couple of charts showing the difference in errors from doppler-derived speeds and carrier-derived speeds. TDCP is essentially calculating a precise position change directly from the carrier phase observables for two epochs. RAIM has also been applied to ignore bad observables.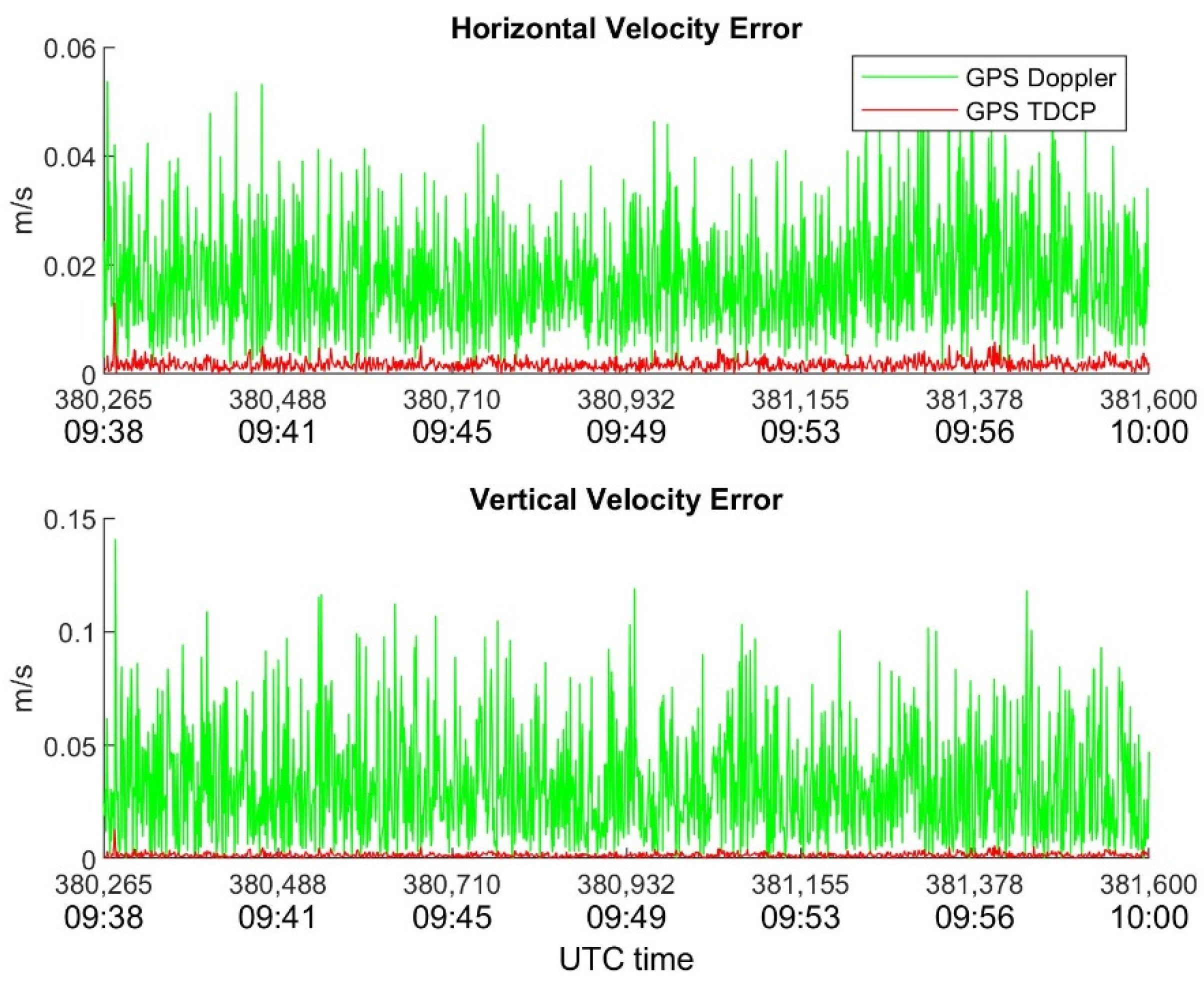 The above chart comes from a paper by Angrisano et al. in Nov 2022 - www.mdpi.com/1424-8220/22/21/8514
The above chart comes from a paper by Angrisano et al. in Nov 2022 - www.mdpi.com/1424-8220/22/21/8514
It's for a Novatel chipset but the u-blox one (ZED-F9P) is pretty similar - see below: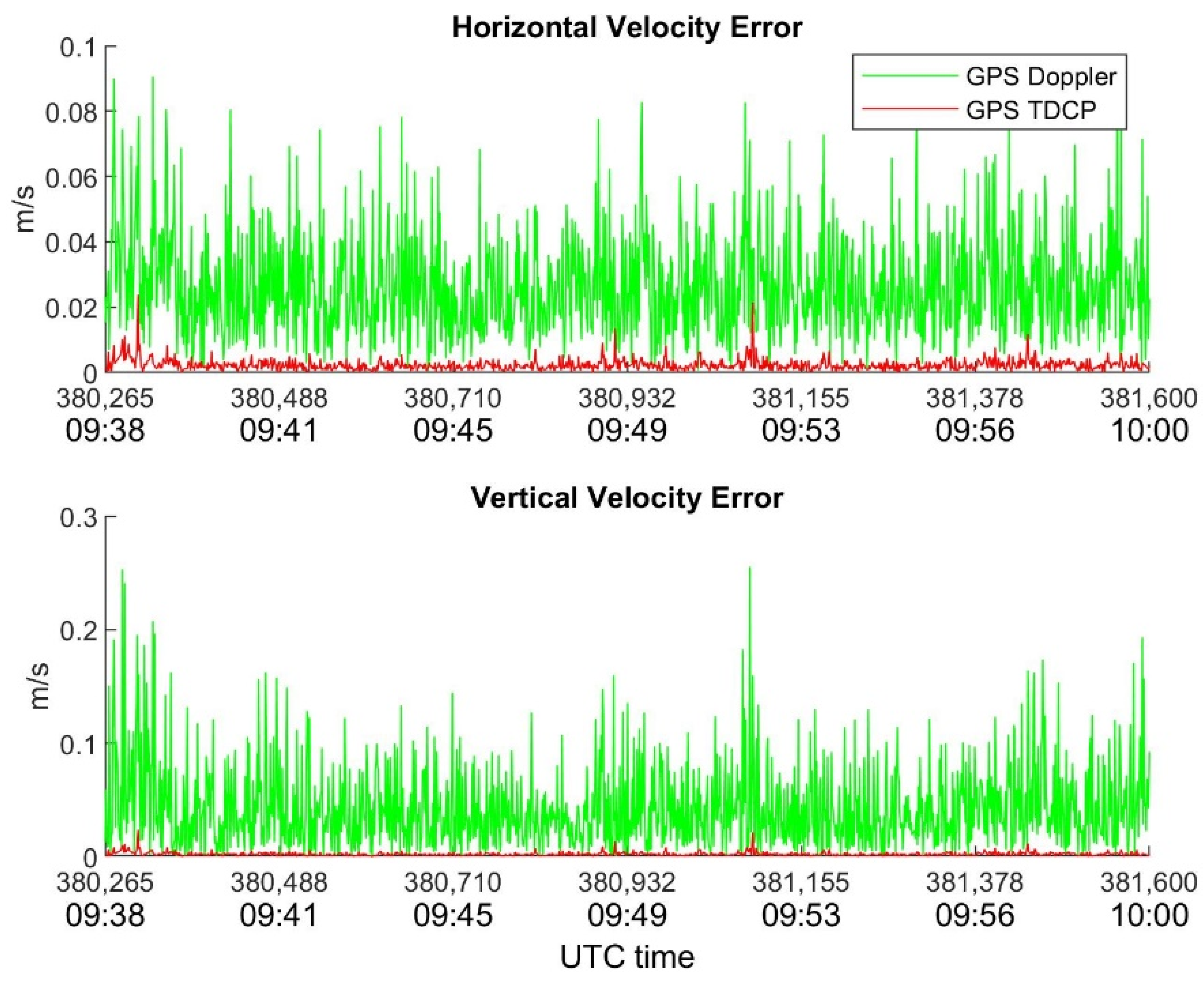
One additional point about the TDCP method is that it can provide really accurate heading and pitch - around 1 degree (RMS).
www.researchgate.net/publication/354548028_Carrier_Phase-Based_Precise_Heading_and_Pitch_Estimation_Using_a_Low-Cost_GNSS_Receiver
If the speedsailing community wants super-accurate speeds then this is probably where we should be looking imho.
Nice graphs and citations. Interesting that they did this with stationary GPS units, just like Tom Chalko in the SDoP paper.Select to expand quoteK888 said..
If the speedsailing community wants super-accurate speeds then this is probably where we should be looking imho.
For general competition (not records), the requirement for accuracy is that results are accurate enough to give the correct ranking. Looking at some GPSTC rankings, it can happen that the top-2 teams are separated by less than 0.1 knots in the 2 second category, which means they are statistically identical (and that the order may be wrong). But larger differences seem much more common. Also, 0.1 knots over 2 seconds corresponds to a difference of 10 cm - that can easily be a movement of the arm, hand, boom, or head that the GPS is attached to. If you go to other categories, the chance of wrong rankings goes down a lot (at least 5-fold in the 5x10 category), so I don't think accuracy with current units is really a problem. The typical separations at the last Weymouth Speed Week also look safe, at least at a cursory glance.
As for the error of 0.05 knots over 500 m at Luderitz you mentioned, do you know if this is based on just comparing the 500 m GPS numbers with the official measurements, or if the GPS numbers are based on gated times, with proper interpolation at the start and end points?
I think they used the static approach for simplicity, thus expecting speeds of zero. Most studies testing positional accuracy do static and kinematic testing, typically comparing against a well regarded Trimble or similar. I suspect that static tests won't be truly representative of real-world accuracy for speed because they are essentially testing at a constant speed. Any kind of acceleration will likely have an impact on speed estimates, due to the nature of how predictions are made within Kalman filters and the dependency on dynamic models. Anyhow, static testing is a solid approach for constant speeds!
With regards WSW, we are more than happy with the consistency of the Mini Motions. I did a lot of testing (typically 4 units at a time) and the norm was for 500m results to be within 0.005 knots of each other iirc. That's not the same as being accurate to within 0.005 knots of course, simply that under the same dynamic conditions they produce consistent results. The final WSW results can be very close sometimes. In 2019 the winning kite was 41.21 and second place at 41.13 using GT-31s. In 2022, Scotty Stallman set a new windsurf record of 38.64, beating the previous record by Anders Bringdal of 38.54. So WSW results can be very close, but we're in a much better place with the Motions than the GT-31s. I'm happy that the competition is fair with the Motions.
The 0.05 knots thing at Luderitz is just a recollection that I heard / read was typical for official video timing vs the u-blox devices. Manfred's GPS uses the gates, I think but I don't know for sure and I don't know what he does by way of interpolation. The 0.05 knots should probably be regarded as anecdotal and not based on large volumes of data since they only check the video timing to ratify records (afaik). Should Luderitz or POS type events ever want to use GNSS technology for official records then they would obviously need something which can produce 500m results which can be trusted to the nearest 0.01 of a knot (as a minimum).
The current WSSRC rules mandate survey grade GPS equipment and that no single data point can have a horizontal accuracy estimate exceeding 1 cm/s. It may be that TDCP would be capable of producing results of comparable accuracy but without the faff of RTK / PPK.
Very interesting analysis guys. :-)
I think we need to keep in mind that when they say 'CM' levels of accuray' for an RTK unit, this often means effectively some multiple of cm, not nessasarily 1cm.
In such cases, eg 5 cm or 7cm, this bring the error up very much closer to that seen with Doppler.
Select to expand quotesailquik said..
Very interesting analysis guys. :-)
I think we need to keep in mind that when they say 'CM' levels of accuray' for an RTK unit, this often means effectively some multiple of cm, not nessasarily 1cm.
In such cases, eg 5 cm or 7cm, this bring the error up very much closer to that seen with Doppler.
SailRocket used the Trimble 5700 which has the following performance specifications.

Select to expand quoteK888 said..
SailRocket used the Trimble 5700 which has the following performance specifications.
Wow! If that's what they actually achieved, that's a huge improvement on the Trimble Macquarie Innovation was using for their records a few years ago (< 8cm, Post processed) ![]()


